|
|
Senior Data Scientist
| TomTom, Inc.
November 2021 - August 2022
Worked with Map Making Platform
team at TomTom, Inc. on building computer vision and machine learning models for aerial
perception, automated integration and generation of road geometry using satellite image data
for
ingestion into
real-time navigation unit of TomTom’s ADAS navigation maps
.
Tools and Technologies : pytorch, pytorch lightning, Azure ML, Azure Databricks,
XGboost,
LightGBM, scikit-learn, pandas, numpy
|
|
|
Machine Learning Scientist
| Fractal, Inc.
June 2018 - October 2021
Worked with the Image and Video Analytics team at Fractal
on the product offering of a platform for image and video understanding using deep learning and
computer vision. Also, worked with Fortune 500
clients such as Sky UK , Mars and
Procter & Gamble on projects involving
forecasting and predictive analytics using machine learning.
Tools and Technologies : python, pytorch, tensorflow, OpenCV, docker,
git,
fast API, django, Google Cloud Platform (GCP), Airflow, Jenkins, Numpy, Pandas, Scipy,
Scikit-learn
|
|
|
Research Asssistant
| Advanced Robotics and Controls Lab, UCSD
January 2023 - Present
Currently working with Prof. Michael
Yip on robotics manipulation of deformable objects
using 3D vision-based forward and invese dynamics for goal conditioned manipulation with
appliction in surgical robotics. Also, worked
on building SE(3) equivariant and deformation invariant neural representations for tasks
such as grasping, manipulating, or
interacting with deformable objects
Tools and Technologies : python, pytorch, pytorch lightning, OpenCV
|
|
|
Research Intern
| Robotics Research Centre, IIIT Hyderabad
Worked with Prof.
Madhava Krishna developing pipeline for online incremental localization and mapping
(SLAM) for indoor 3D scenes using implicit
representation formulated by neural radiance fields (NeRF) and finding relative pose between
NeRF submaps
Tools and Technologies : python, pytorch, pytorch lightning, OpenCV, Open3d,
transforms3d, pybullet
|
|
|
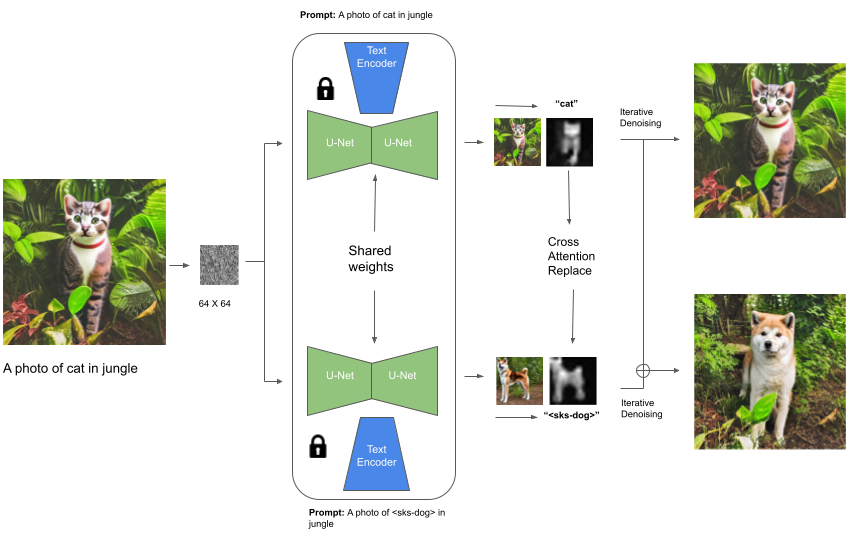
Controllable subject guided
text-to-image generation and editing using diffusion models
Paper /
Code
Developed pipeline for personalized text-to-image generation and editing using latent
diffusion models
(generative AI), incorporating LoRA finetuning for image generation and cross-attention
guidance for image editing
(pytorch / hugging face diffusers /stable diffusion)
Tools and Technologies : python, pytorch, huggingface transformers, hugging face diffusers, stable diffusion,
OpenCV, transformers
|
|
|
Stereo visual SLAM with local bundle adjustment on KITTI
dataset
Code /
Demo Video
Implemented a Visual SLAM pipeline for 6-DOF camera pose estimation and outdoor scene mapping
using techniques
in multi-view geometry - RANSAC, feature tracking, 3D reconstruction, pose estimation (PnP
algorithm) and
bundle adjustment
Tools and Technologies : python, numpy, open3d, openCV, transforms3d, matplotlib, scipy
|
|
|
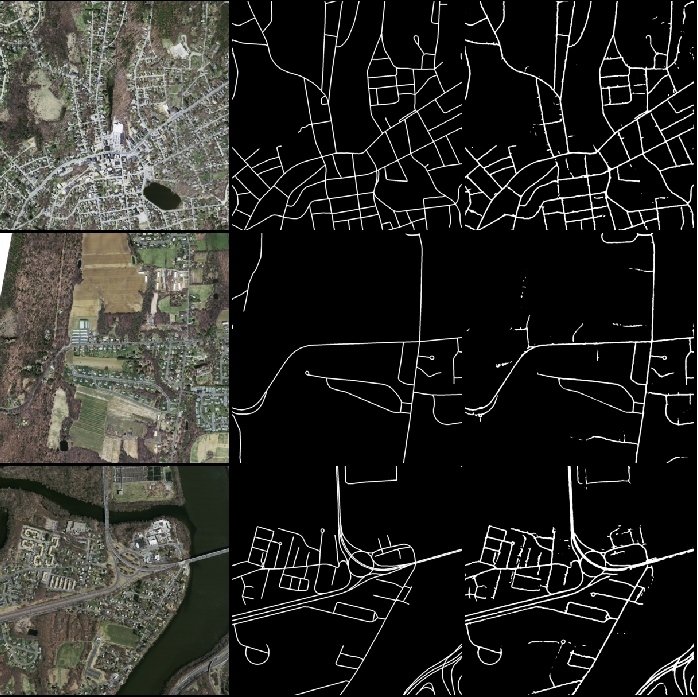
How to Extract Roads from Satellite Images using Semantic
Segmentation?
Paper /
Code
Developed framework for extraction of road geometry from satellite images using convolutional
neural network (CNN)
based semantic segmentation architectures experimenting with data augmentations, schedulers,
optimizers and loss functions
Tools and Technologies : python, pytorch, pytorch-segmentation, torchvision, pillow
|
|
|
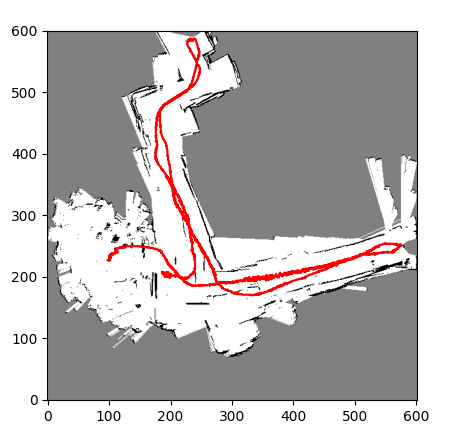
Particle Filter SLAM for an indoor differential-drive robot
Paper /
Code
Created Particle Filter SLAM pipeline using IMU odometry data and LiDAR scans from sensors
mounted on the
differential drive robot to enable localization and build occupancy grid map of the
environment
Tools and Technologies : python, numpy, matplotlib, OpenCV
|
|
|
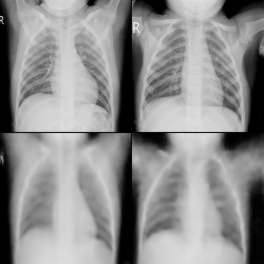
MedVAE: Generating Chest X-Ray Images using
Variational Autoencoders (VAE)
Paper /
Code
Programmed variational auto-encoder (VAE) trained on a dataset of chest X-rays from patients
diagnosed with pneumonia
to generate realistic and representative chest X-ray images for improved diagnostic
Tools and Technologies : python, pytorch, numpy, matplotlib, OpenCV, matplotlib
|
|
|
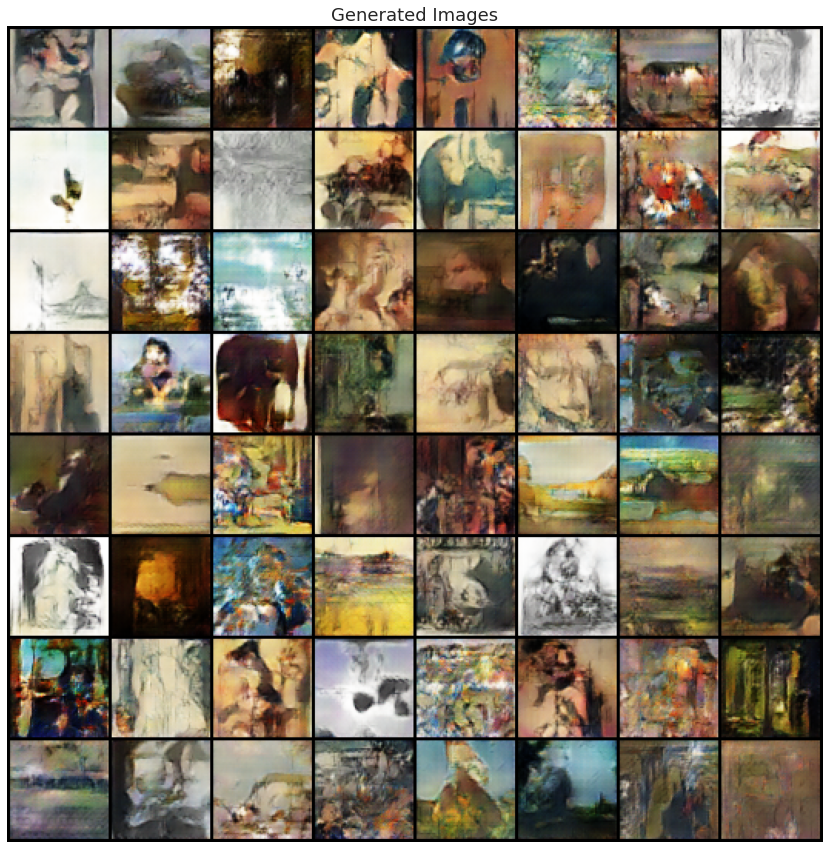
GAN-Art: Generating Artwork using Deep
Convolutional Generative Adversarial Networks (DCGANs)
Paper /
Code
Programmed deep convolutional generative adversarial network (DCGAN) trained on 50,000+ images
from 10 different artistic styles
to generate high-quality and realistic artwork images that closely resemble the
characteristics of each artistic style
Tools and Technologies : python, pytorch, numpy, matplotlib, OpenCV, matplotlib
|
|
|
Optimised orientation tracking using Riemann stochastic gradient descent
Paper /
Code
Worked on orientation tracking of a rotating body using quartenion kinematics on IMU data,
constrained optimization
using Riemannian stochastic gradient descent and generating 360-degree spherical panorama of
the indoor scene
Tools and Technologies : python, jax, numpy, matplotlib, OpenCV, matplotlib
|
|
|
Object-centric visual and spatial representations on multi-view CLEVR dataset
Doc /
Code
Researched on momentum contrastive learning to build view invariant visual and view-dependent
spatial object centric embeddings to build scene graph on multi-view CLEVR dataset
Tools and Technologies : python, pytorch, numpy, matplotlib, OpenCV
|
|